{kind=link}

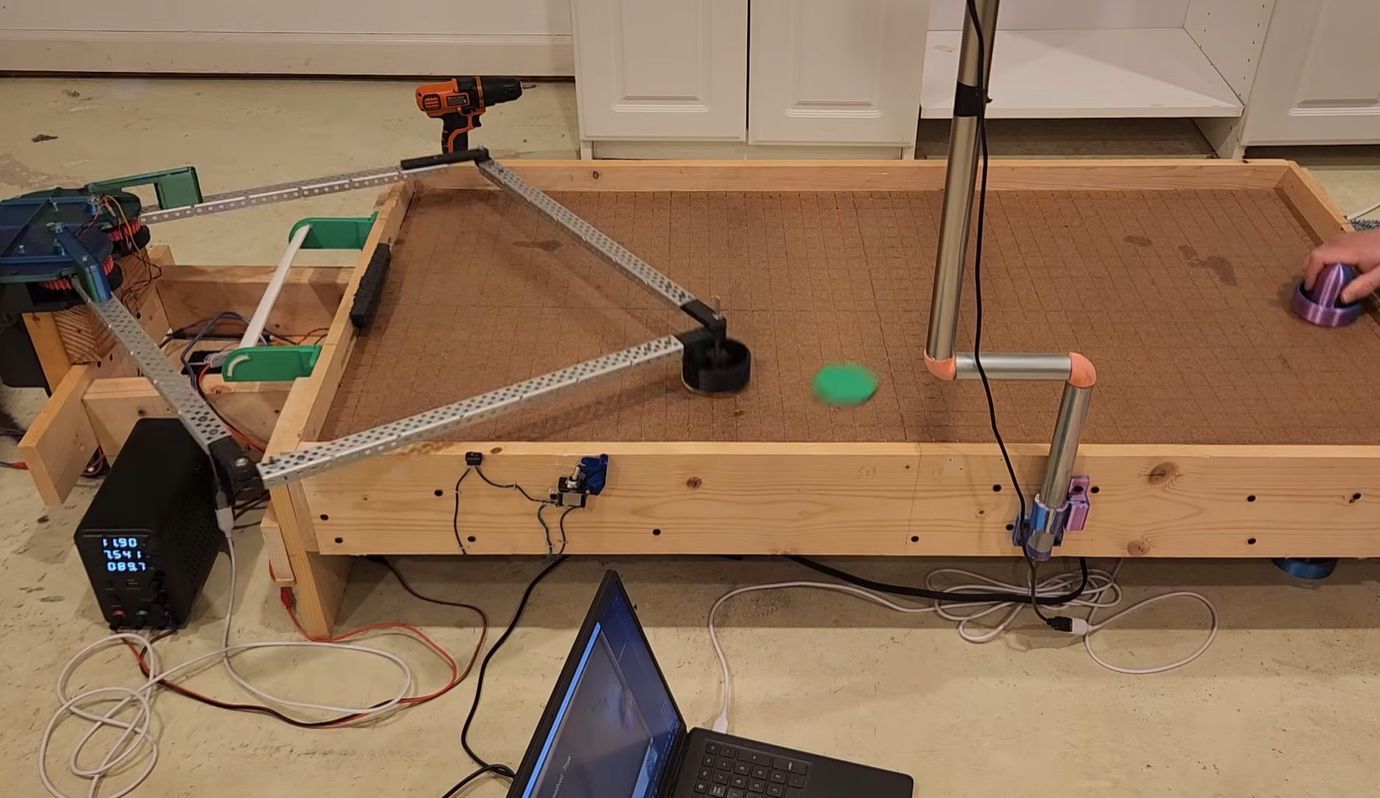
Air hockey is a kind of sports activities that’s each extremely enjoyable, but in addition extremely irritating as enjoying it by your self is a somewhat lonely and unfulfilling expertise. That is the place an air hockey enjoying robotic just like the one by [Basement Builds] might turn out to be useful. In spite of everything, after you completed constructing an air hockey desk from scratch, how arduous might it’s to make a robotic that merely strikes the paddle round to hit the puck with?
An air hockey desk is certainly not extraordinarily difficult, being principally only a chamber that has a lot of small holes on the highest via which the air is pushed. This creates the air layer on which the puck seems to drift, and permits for super-fast motion. For this half numerous chamfered holes had been drilled to get clean airflow, with an inline 12VDC duct fan offering as much as 270 CFM (~7.6 m3/minute).
Initially the robotic used a CoreXY gantry configuration, which proved to be unreliable and somewhat cumbersome, so as an alternative two motors had been used, every linked to its personal gearbox. These manipulate the paddle place by altering the geometry of the arms. Curiously, the gearbox makes use of TPU for its gears to soak up any impacts and improve endurance as pure PLA ended up falling aside.
The place of the puck is recorded by an overhead digital camera, from the place a Python script – utilizing the OpenCV library working on a PC – determines the way to modify the arms, which is executed by Arduino C++ code working on a board connected to the robotic. All of that is out there on GitHub, which because the video makes clear is principally dishonest as you don’t get to get pleasure from doing all of the trigonometry and physics-related calculating and debugging enjoyable.
